Величина энергии, переданной на здание, зависит, как известно, от соотношения спектров сейсмического воздействия и собственных колебаний здания. Чем ближе пики спектров, тем больше при прочих равных условиях энергия, передаваемая зданию. Эта энергия поглощается в основном неупругими деформациями конструкций. Исходя из вышесказанного можно определить две основные задачи сейсмоизоляции: 1) развести спектры и тем самым уменьшить количество энергии, передаваемой на здание и 2) обеспечить поглощение оставшейся энергии при помощи специальных мероприятий. Для решения этих задач применяется комплекс мероприятий, устраиваемых в пределах подвальной части здания [157]. Как правило, этот комплекс предусматривает установку демпферов различного типа. Для включения демпферов в работу необходимо обеспечить некоторую свободу перемещения верхней части сооружения относительно нижней. В то же время это перемещение не должно быть слишком большим. Для ограничения перемещения одной части здания относительно другой устанавливают ограничительные упоры.
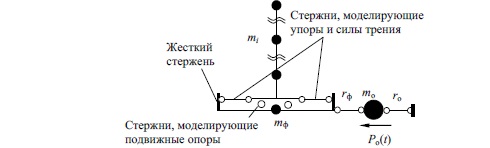
Динамический анализ таких систем сейсмоизоляции невозможно проводить по классическим моделям, даже если РДМ может быть представлена в виде консольного стержня, по описанным выше причинам. Простейшая РДМ системы сейсмоизоляции приведена на рис. 2.7. Эта модель включает в себя массу основания (mо) и связь, моделирующую динамические характеристики грунта (rо). Податливость фундамента моделируется стержнем rф. Если движением фундамента относительно основания пренебрегают, то данный стержень исключается из расчетной схемы, а масса фундамента присоединяется к массе основания.
Рис. 2.7. Динамическая модель сейсмоизолированного здания
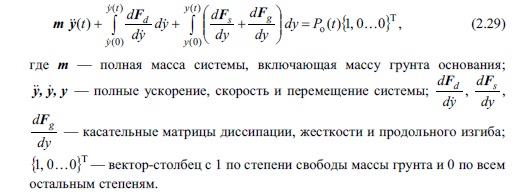
Уравнение движения нелинейной сейсмоизолированной системы можно представить в следующем виде:
В результате решения уравнения (2.29) определяются полные перемещения системы относительно точки закрепления стержня, моделирующего грунт основания. Для получения смещений масс относительно основания необходимо из значений перемещений всех масс вычесть перемещение массы основания. Перемещение массы основания вызывает перемещение верхнего строения как жесткого целого. Это перемещения не влияет на величину сил отпора. Очевидно, что, для того чтобы и силы демпфирования не зависели от полной скорости движения системы, необходимо коэффициенты матрицы демпфирования формировать по формуле (2.13).
При горизонтальном перемещении верхней части сейсмоизолированной системы относительно нижней в месте их контакта будет возникать сила трения. Определение величины этой силы в каждый момент воздействия довольно сложная задача, так как в процессе воздействия возникают различные эффекты, осложняющие вычисления: штрибек-эффект, вибрационное сглаживание, фрикционные автоколебания. Значительно упрощает задачу введение среднего значения силы трения, не зависящей от перечисленных эффектов. Наиболее простая модель [175] позволяет использовать скорректированный закон Амонтона — Кулона. В РДМ сейсмоизолированной системы сила трения моделируется шарнирным стержнем большой жесткости с пределом по силе трения покоя, соединяющим верхнее строение с фундаментом. При достижении сдвигающей силой значения силы трения покоя стержень выключается из работы. Включение происходит при изменении направления движения. Изменение величины силы трения движения по сравнению с величиной трения покоя учитывается посредством изменения диссипации моделирующего стержня. При этом матрица диссипации системы принимается пропорциональной матрице жесткости. Таким образом, сила трения входит в третий член уравнения (2.29) и находится под управлением скорости.
Для моделирования работы упоров — ограничителей применяется шарнирный стержень с нулевой начальной жесткостью, соединяющий верхнее строение с фундаментом. Включение стержня происходит в момент, когда его деформация превысит величину заданного зазора. В этот момент жесткость принимает заданное значение. Выключение стержня происходит в момент изменения направления движения.
Подвижные опоры моделируются шарнирными стержнями, имеющими большую жесткость на сжатие. Если в качестве подвижных опор используются стальные витые пружины, то они моделируются стержнями, работающими на сдвиг и сжатие. В этих стержнях сдвиговая жесткость зависит от степени сжатия пружин.