В некоторых задачах, например при учете податливости основания, введения сейсмозащиты из упругих элементов (сейсмоизоляции) между колоннами каркаса и фундамента, вычисление эффективной нагрузки по формуле (2.20) представляется некорректным. Например, динамический анализ систем сейсмоизоляции невозможно проводить по классическим моделям, даже если РДМ может быть представлена в виде консольного стержня. Основная причина невозможности применения классической РДМ заключается в том, что единичное статическое перемещение основания не вызывает единичного перемещения по всем степеням свободы и соотношение между полными и относительными перемещениями не будет линейным. Поэтому расчет необходимо вести на полные перемещения и ускорения, а не на относительные. В этом случае уравнение движения для упругой системы будет иметь следующий вид [167]:
где y t = yo + y — полные перемещения системы; yo — перемещение свободной поверхности грунта основания.
Правая часть уравнения (2.24) представляет собой эффективную сейсмическую нагрузку, выраженную через коэффициенты затухания и жесткости системы. Перемещение yо и скорость y&о свободной поверхности грунта могут быть определены из уравнения
прямыми методами численного интегрирования при заданной акселерограм-ме свободной поверхности грунта &y&o .
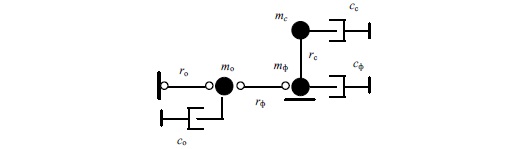
Уравнение (2.24) идентично (2.3), однако на практике не используется, так как применяемое в этом случае выражение для эффективной сейсмической нагрузки более сложное, а сейсмическое воздействие обычно задается в виде ускорений основания. Динамическая модель, реализующая данную схему, представлена на рис. 2.6.
Рис. 2.6. Динамическая модель основание — фундамент — сооружение при расчете на горизонтальную сейсмику
Основная трудность построения модели заключается в определении величины массы основания. Один из способов определения присоединенной массы грунта описан в [124]. Жесткость основания вычисляют исходя из доминантной частоты акселерограммы по известной величине массы [167]. Коэффициент затухания для основания принимается в пределах 0,3¸0,5 критического [130]. Величина демпфирования может определяться по [18]. Если масса основания намного больше массы сооружения, то результаты, полученные по формулам (2.3) и (2.24), идентичны. Такой подход весьма упрощен, тем не менее он позволяет учесть податливость основания и элементы сейсмозащиты.
Основной недостаток описанного выше подхода заключается в том, что он не дает возможности учесть влияние присоединенного сооружения на колебания свободной поверхности грунта. Если известна акселерограмма скального основания &y&s , то моделирование грунта основания не представляет сложной задачи. Практически все записи землетрясений получены на свободной поверхности грунта. В [167] описаны модели расчета по схеме основание — фундамент — сооружение, позволяющие исключить движение скального основания. Простейшая из них может быть сведена к виду
где m~, c~, r~— матрицы масс, диссипации и жесткости системы основание — фундамент — грунт (см. рис. 2.6):
эффективная нагрузка приложена только по степени свободы массы грунта основания и определяется по формуле (2.25)
Если для исследуемой площадки имеется расчетная акселерограмма, то динамические характеристики основания формируются довольно просто. В каждой акселерограмме можно выявить доминантную частоту. Например, для акселерограммы Эль Центро доминантная частота согласно [4] равна 18 рад/с. Зная массу грунта основания, вовлекаемого в динамический процесс, можно легко подсчитать оставшиеся характеристики: