Определение жесткостных характеристик упрочняющегося материала в пластической стадии работы
Для проведения численного исследования необходимо определить касательную (мгновенную) жесткость конечного элемента, адекватно отражающую его напряженное состояние в пластической стадии. Непосредственное применение модуля касательной жесткости в форме (3.10) некорректно, так как он отражает только меру упрочнения при вычислении пластических деформаций. Необходимо определить жесткость пластинчатого элемента, связывающую полные перемещения с полными усилиями и соответственно деформации с напряжениями.
Уравнения теории упругости в матричном виде относительно неизвестных компонентов векторов s, e, u состоят: из матричного уравнения, связывающего деформации и перемещения:
e = А u, (3.11)
матричного уравнения упругости
s = De, (3.12)
граничных условий на поверхности с заданными силами
AS s = gS, (3.13)
граничных условий на поверхности с заданными перемещениями
u = uS. (3.14)
В формулах (3.11)—(3.14) введены следующие обозначения: векторы напряжений s, деформаций e и перемещений u:
sТ = {sx, sy, txy}, eT = {ex, ey, gxy}, uT = {ux, uy};
A — матрица операций дифференцирования:
векторы поверхностных сил gS и перемещений uS:
gS = {Xn, Yn}, uS = {uSx, uSy}, где n — нормаль к поверхности тела;
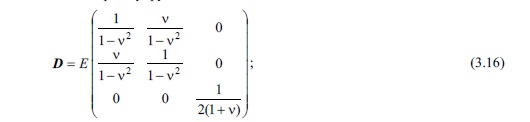
D — матрица упругости:
AS — матрица направляющих косинусов нормали n к поверхности:
Объемные силы не учитываются ввиду их малости по сравнению с внешними нагрузками.
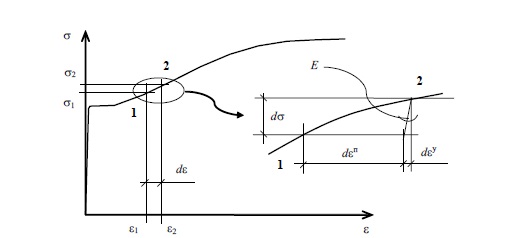
Рассмотрим процесс перехода элемента из состояния 1 в состояние 2 при изменении внешней нагрузки на величину dP (рис. 3.2). Дополнительно введем в рассмотрение условно-упругую (замещающую) систему. Эта система отличается от рассматриваемой только тем, что связь между приращениями напряжений и приращениями полных деформаций линейна и определяется соотношением (3.12)
s = D* e,
где D* — матрица упругости замещающей системы; e = eу + eп — сумма упругих и пластических деформаций.
Рис. 3.2. К определению условной жесткости
Векторы перемещений для обеих систем равны, равны также величины работ, совершаемых внешними нагрузками на соответствующих перемещениях [41].
Докажем, что матрица упругости замещающей системы при переходе из состояния 1 в состояние 2 пропорциональна матрице упругости исходной системы. Для этого запишем в матричной форме зависимость между приращениями напряжений и перемещений
ds = A D duу, (3.18)
где ds — вектор приращения напряжений; A — матрица операций дифференцирования; D — матрица упругости упругой линейной системы; duу — вектор приращения упругих перемещений.
С другой стороны, тот же переход осуществим при помощи условно-упругой (замещающей) системы:
ds = A D* du, (3.19)
где D* — искомая матрица; du — вектор приращения полных перемещений. Приравняв правые части уравнений (3.18) и (3.19), найдем
D* = cD,
т. е. матрица упругости замещающей (условно-упругой) системы пропорциональна матрице упругости упругой системы.