В расчетах подавляющего большинства строительных конструкций масса сосредоточивается в узлах пересечения элементов. В общем случае каждый узел имеет шесть степеней свободы. Пренебрежение инерцией поворота сосредоточенных масс, с которыми связана лишь небольшая часть кинетической энергии, позволяет существенно уменьшить размер динамической матрицы. Для ряда конструктивных решений можно достигнуть дальнейшего уменьшения размера РДМ, пренебрегая осевыми деформациями стержней. Исключение несущественных степеней свободы может быть выполнено методом статической конденсации Гайана [167] или методом усечения матрицы единичных перемещений. Наиболее эффективен метод, основанный на усеченной матрице единичных перемещений по искомым степеням свободы. Рассмотрим возможность применения этого метода в детерминированном анализе. Перепишем уравнение (2.9) в виде
С другой стороны, динамические силы S(t)могут быть найдены из расчета усеченной системы
где S(t) = m D&y&(t) + c Dy&(t) + DP(t) ; m и c — соответственно матрицы масс и демпфирования усеченной системы; R — матрица жесткости усеченной системы.
Ввиду того что исключенные степени свободы не оказывают существенного влияния на величины инерционных сил, можно принять S(t)Î S(t) по соответствующим степеням свободы. После вычисления инерционных сил для усеченной системы по формуле (2.22) последние прикладываются по соответствующим направлениям основной системы уравнения (2.21), которое превращается в статическое уравнение РСМ. Усеченная система является расчетной динамической моделью. Такой метод формирования динамической модели позволяет создать модель практически любого вида: от простейшей консольной до сложной, со степенями свободы в различных направлениях, с распределенными параметрами.
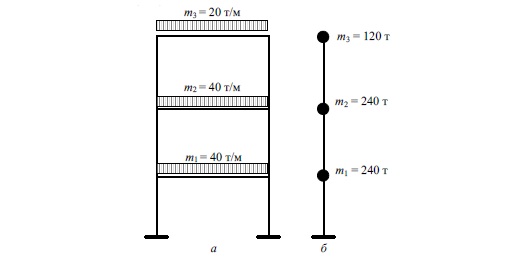
Для примера рассмотрена однопролетная трехэтажная рама, представленная на рис. 2.1, в упругой постановке.
Рис. 2.1. Динамические модели простейшей системы
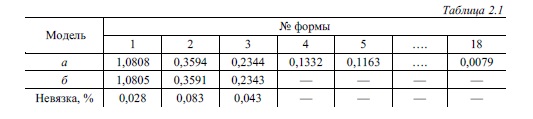
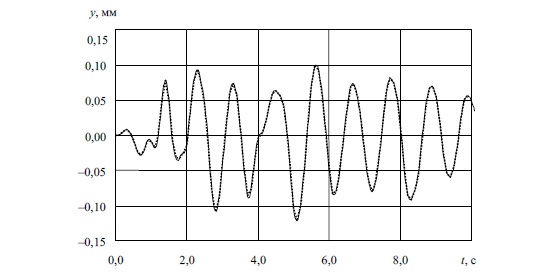
Исследованы две динамические модели: а — с тремя степенями свободы в каждом свободном узле и распределенной по ригелям массой и б — приведенная к невесомому консольному стержню с сосредоточенными массами. Для первой модели число степеней свободы равно 18, для второй — 3. Матрица жесткости консольного стержня модели б получена из модели а методом усечения единичной матрицы перемещений. Массы модели б собраны по грузовым площадям. Сейсмические силы в уровне ярусов рамы для модели б определены по формулам (2.21) и (2.22). В табл. 2.1 представлены значения периодов для двух моделей, на рис. 2.2 — перемещения третьего яруса при воздействии акселерограммы Эль Центро.
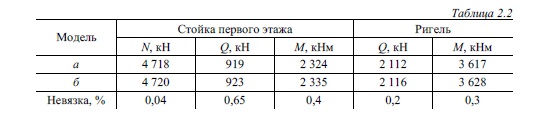
В табл. 2.2 приведены значения усилий в стойке и ригеле первого этажа от особого сочетания нагрузок.
Рис. 2.2. Перемещение третьего яруса рамы: точки — трехмассовая система
Таким образом, для систем, динамическая модель которых может быть представлена в виде консольного стержня, результаты расчета по двум схемам идентичны как по перемещениям, так и по усилиям в элементах РСМ. Конденсация масс и выбор основных степеней свободы для таких систем не представляет больших затруднений. При этом перемещения системы и усилия в элементах для двух схем РДМ практически не отличаются.