Стержневой элемент моделируется композицией пластинчатых конечных элементов, находящихся в условиях плоского напряженного состояния. Количество элементов определяется исходя из компромисса между достижением максимальной точности расчета и возможностями современной вычислительной техники. Количество элементов будет также определяться сложностью сечения стержня и его протяженностью.
Стержни между собой соединяются в узлах каркаса. Естественно, что для каркасных конструкций нет необходимости моделировать весь каркас плоскими конечными элементами в одной расчетной схеме. Анализ каркаса на любые виды воздействий можно проводить в два этапа, основываясь на двух расчетных схемах.
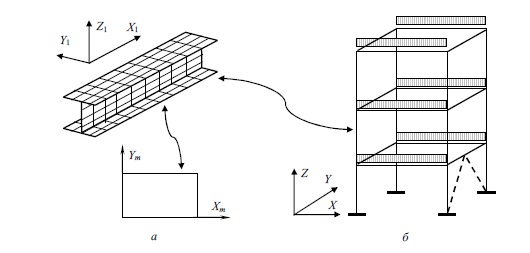
Схема 1. Жесткость стержня определяется из расчета модели плоских конечных элементов на соответствующие единичные нагрузки, прикладываемые в узлах опорных элементов (рис 4.1, а). Напряженно-деформированное состояние конечных элементов определяется по перемещениям, полученным из схемы 2. Расчет по этой схеме может не выполняться, если в схеме 2 не используются стержни, моделируемые элементами плоского напряженного состояния
Рис. 4.1. Общая схема расчетной статической модели
Схема 2. Перемещения узлов определяются из расчета пространственной стержневой системы (рис. 4.1, б) на соответствующие воздействия (динамические или статические), жесткость стержней — из расчета по схеме 1. Предусмотрена также возможность определять жесткость стержней аналитически, если не требуется учета нелинейного поведения стержня.
Расчет на статические и динамические нагрузки ведется шаговым методом. Если процесс динамического воздействия разбивается на малые интервалы времени, то программа статического нагружения — на малые интервалы по приращению нагрузки. Если проводится динамический анализ, то вначале конструкция загружается статической нагрузкой, а затем производится численное интегрирование уравнения движения.
Расчет всей системы на каждом шаге как при статическом, так и при динамическом нагружении состоит из следующих этапов:
1) формирования компонентов матрицы жесткости для каждого стержня из расчета по схеме 1;
2) формирования матрицы жесткости стержневой системы схемы 2;
3) определения приращений узловых перемещений стержней из расчета по схеме 2;
4) определения напряженно-деформированного состояния каждого стержня по его узловым перемещениям из расчета по схеме 1;
5) определения жесткостных характеристик для каждого конечного элемента схемы 1;
6) перехода на п. 1 для следующего шага нагружения.
Алгоритм определения компонентов жесткости стержня, моделируемого плоскими конечными элементами (схема 1), состоит из следующих этапов:
1) единичные перемещения узлов стержня преобразуются в соответствующие перемещения опорных узлов конечных элементов;
2) определяются перемещения всех узлов системы от единичных перемещений опорных точек;
3) определяются напряжения в граничных элементах;
4) определяются реакции в опорных точках, которые преобразуются в узловые усилия;
5) вычисляются компоненты жесткости стержня.
В качестве элемента, моделирующего работу тонкостенных стержней, выбран прямоугольный элемент плоского напряженного состояния. Количество неизвестных в каждом узле — два линейных перемещения по направлениям Xm и Ym (рис. 3.1). Для упрощения формирования матрицы жесткости ансамбля плоских конечных элементов принято соглашение о том, что ось Xm плоского КЭ всегда направлена по оси X1 стержня.
Количество неизвестных для системы конечных элементов (схема 1) — три линейных перемещения по осям X1, Y1 и Z1. Система координат для стержня выбирается так, чтобы ось X1 была направлена по продольной оси стержня, а оси Y1 и Z1 образовали правостороннюю тройку координат. Система координат схемы 1 является местной по отношению к пространственной стержневой системе схемы 2. Положение стержня в пространстве определяется координатами его концов, а также углом поворота сечения относительно оси Х1.