Для моделирования тонкостенных стержней применен прямоугольный элемент плоского напряженного состояния (рис. 4.2). В каждом узле элемента имеются две степени свободы: перемещения по осям X и Y. Функция формы принята в виде билинейного полинома
где коэффициенты ai определяются из граничных условий.
Определение жесткости конечного элемента в упругой стадии работы основано на известных зависимостях линейной теории упругости [128]:
1) формулах Коши, связывающих перемещения и деформации плоского напряженного состояния:
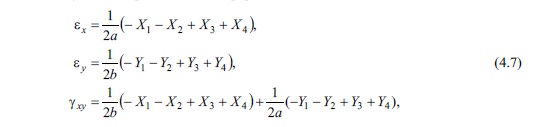
подстановка в которые функций формы и координат центральной точки дает следующие выражения для деформаций:
где Xi и Yi — перемещения узлов элемента по осям X и Y; 2) физических уравнениях, связывающих напряжения и деформации в упругой стадии:
где Е — модуль упругости; n — коэффициент Пуассона. Деформации и напряжения достаточно определять в центре КЭ. Матрица жесткости элемента К определяется из условия равенства вариации потенциальной энергии деформации и работы внешних сил на возможных вариациях перемещений в узлах. Вариационные принципы в теории упругости исследованы достаточно полно [41, 113, 128], поэтому ограничимся окончательным уравнением для определения коэффициентов матрицы жесткости
где матрицу В определим следующим образом: введем вектор обобщенных перемещений для прямоугольного элемента
и интерполяционную матрицу
при этом u = Fq, обозначим B = AF, где А — матрица операторов дифференцирования, fi — функции формы в соответствии с (4.5). Напряжения и деформации в элементе определяются следующим образом:
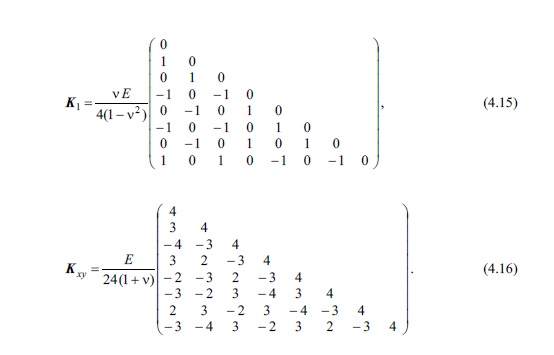
После интегрирования уравнения (4.9) нетрудно заметить, что матрица жесткости элемента состоит из четырех слагаемых: жесткости от перемещения по направлению оси Х (Kx); перемещения по оси У (Ky); взаимных линейных перемещений перпендикулярного направления (K1) и сдвиговой жесткости (Kxy). Все матрицы симметричны, поэтому ниже представлены только нижние треугольники этих матриц.
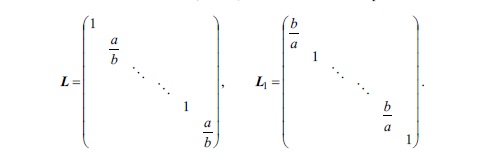
Матрица элемента получена суммированием приведенных выше матриц:
где t — толщина элемента; L и L1 — диагональные матрицы вида
Такой подход позволяет унифицировать задание исходных данных для формирования матриц жесткости конечных элементов. Матрицы (4.13)— (4.16) хранятся в виде констант, а матрица конечного элемента (4.17) вычисляется для конкретного элемента с учетом его размеров и физических констант.
Матрица жесткости системы пластинчатых элементов, моделирующих тонкостенный стержень, составляется с использованием матрицы инцидент-ности [9]. Этот метод достаточно известен, хорошо разработан и не нуждается в детальном описании.